

協働ロボットの要求事項:安全適合の監視停止とは!?
こんにちは😊ブログ担当の馬場です。
前回の、『最近話題の協働ロボットって?』では、協働ロボットとはどういったロボットなのかをご紹介いたしました。
今回は、その中で紹介した要求事項1について分かりやすく説明します。
【前回の復習】 協働ロボットは、産業Robotの一種ですが、機能安全(Functional Safety)という考えを取り入れたRobotのことをいいます。国際規格 ISO 10218-1:2011(JIS B 8433-1:2015)に規定されている下記条件を満たしたRobotのことで、協働運転中とわかる視覚表示を備える(前提条件)、更に下記1~4の要求事項に一つ以上適合したもの。
|
協働ロボットの要求事項1とは何か?
要求事項1:安全適合の監視停止って!?
JIS規格(ISO規格の翻訳)では、以下のように書かれています。
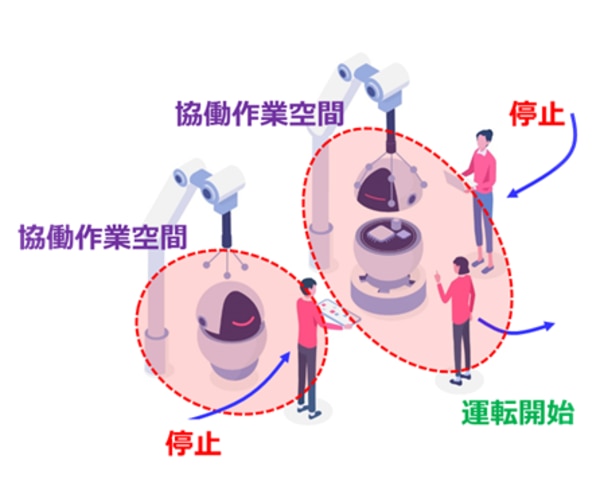
- 人間が協働作業空間内に存在するときは、ロボットは停止しなければならない。
- 停止機能は、「安全関連制御システム性能(ハードウェア及びソフトウェア)」及び「保護停止」に適合しなければならない。
- 人間が協働作業空間から離れると、ロボットは自動運転に復帰してもよい。又はロボットは、JIS B 9960-1に従った停止カテゴリ2としてもよい。
- この停止は、一旦停止したら、安全関連制御システムによって監視しなければならない。
- 安全適合の監視停止機能の不具合 (障害)は、停止カテゴリ0としなければならない。
参考:JIS B 9960-1は、「機械の安全性規格」についての規格で、「機械の電気装置」の「一般要求事項」について述べられたものです。 停止カテゴリについては、別な機会で説明します。 |

読んでも分かったような??分からないような、、、??
分かりやすく言うと!!
『人』が、ロボットの作業空間内(協働作業空間内)に入ってきたら、ロボットは停止しなさい!停止完了後(停止中)もロボットの動力は、入ったまま”でも”よい。
ただし停止中は、安全を監視している制御部が故障していないか監視しなさい。もし、この制御機能に障害が発生したら、ロボットの動力を切りなさい。
『人』が、ロボットの作業空間外(協働作業空間から離れる)に出たら、ロボットは自動運転開始してもよいです! ということ。
ただし、これには条件が!
停止機能は、「安全関連制御システム性能(ハードウェア及びソフトウェア)」及び「保護停止」に適合することが条件です。つまり、「安全関連の制御システムの安全性能」と「保護停止」という2つの条件をクリアしないといけません。
安全関連の制御システムの性能と、保護停止の条件とは?
1.安全関連の制御システムの性能とは
1)制御システムの安全関連部の性能が、カテゴリ3 and アーキテクチャはPL=d
2)プルーフテスト間隔が20年以上、ハードウェアフォールトトレランスが1、SIL2
2.保護停止とは
安全のために、動作を中断しても動作の再開・続行が可能な停止のこと。ただし、上記1-1)or 1-2)の条件を満たした停止の機能のことを言います。
Note:上記のような制御上の性能のことを、機能安全(Functional Safety)と呼び、 規格上で定められた安全機能です。 |
では、安全関連部の制御システムで、
1.カテゴリ3のアーキテクチャ and PL=dとは?
2.プルーフテスト間隔が20年以上、ハードウェアフォールトトレランスが1、SIL2とは?
これらも難しいですね!!これは、別な機会にまとめて説明していきます。ここでは、上記の性能をクリアしないといけないと言うことを覚えておいてください。
次回は、ハンドガイドについて説明します。
copyright 2022 SK Solution Co.Ltd All rights reserved
▼お問い合わせはこちら
▼ロボット出張デモ / ロボルーム見学申し込みはこちら
▼【お役立ち資料】これから協働ロボットの導入を検討される方へおすすめ
▼ロボットの要求事項に関しては下記の記事もおススメです。





