
協働ロボットの要求事項:ハンドガイドって!?
こんにちは😊ブログ担当の馬場です。
前回は協働ロボットの『要求事項1:安全適合の監視停止』についてご紹介いたしました。
今回は前回に引き続き協働ロボットの、『要求事項2:ハンドガイド』についてわかりやすく説明いたします。
【前回までの復習】 協働ロボットは、産業Robotの一種ですが、機能安全(Functional Safety)という考えを取り入れたRobotのことをいいます。国際規格 ISO 10218-1:2011(JIS B 8433-1:2015)に規定されている下記条件を満たしたRobotのことで、協働運転中とわかる視覚表示を備える(前提条件)、更に下記1~4の要求事項に一つ以上適合したもの。
|
協働ロボットの要求事項2とは何か?
要求事項2:ハンドガイドとは!?
JIS規格(ISO規格の翻訳)では、以下のように書かれています。
ハンドガイド装置がある場合、エンドエフェクタの近くに配置し、次を備えなければならない
a) 5.5.2 及び 5.8.4 に適合する非常停止
b) 5.8.3 に適合するイネーブル装置
ロボットは、安全適合監視速度機能が有効な状態で運転しなければならない(5.6.4参照)。安全適合の監視された速度制限の値は、リスクアセスメントによって決定しなければならない。
読んでみて分かったような、分からないような、、、5.5.2、5.8.4、5.8.3に適合する・・・?! 5.6.3参照!? 文書は短いが、いまいちわからない・・・

💡分かりやすく言うと💡
協働ロボットのハンドガイド装置は、エンドエフェクタ近くに配置し、そこに非常停止とイネーブル装置を備えなさい、ということ。
a)「5.5.2 及び 5.8.4 に適合する非常停止」 とは
安全関連部の制御システムの非常停止機能として、以下の性能を備えること(ペンダントや教示制御装置をハンドガイド装置として使う場合も同様)
カテゴリ3のアーキテクチャ and PL=d
- プルーフテスト間隔が20年以上、ハードウェアフォールトトレランスが1 SIL 2
上記2つのどちらかと、停止カテゴリが「0 or 1」の停止機能を1つ以上、持つこと。さらに、以下の5つが実現できる非常停止機能であること
- 他の全ての制御に優先する
- 動作の停止ができる(どの状態でも即停止する)
- ロボットアクチュエータへの動力遮断ができる
- リセットするまで非常停止状態を維持できる
- 手操作によってのみリセット可能
- リセットのみ(ターンリセット)では再起動しない
- リセットは、再起動ができる状態への遷移のみ
これら5つの機能は、非常停止であれば当たり前のことですが、ポイントは安全関連部の制御システムが、前述の1)or 2)に適合していることです。単に、通常の回路構成及び汎用部品で構築すれば良いということではありません。この点を忘れないようにしなくてはいけません。
b) 「5.8.3 に適合するイネーブル装置」、、、これって!?
3つのポジションをもったスイッチで、下図の様な動作をするスイッチをイネーブル装置といいます。中央の位置(イネーブル位置)が保持されているときのみ、ロボットの動作を危険とみなさず、動作を許可するというものです。
制御機器メーカーが販売している、イネーブルスイッチがこれに該当し、安全認証されたスイッチのことを言い、デッドマンスイッチと呼ぶこともあります。
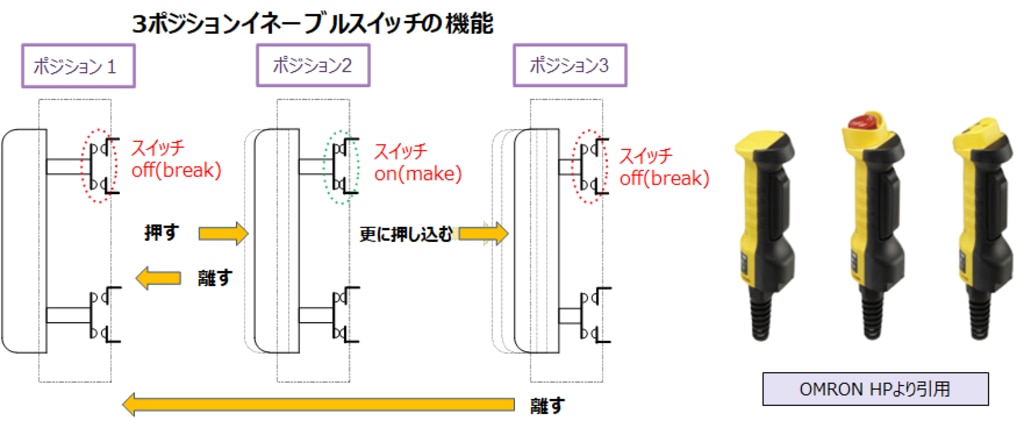
イネーブルスイッチ動作の特徴 |
ポジション1:手を離した状態 |
|---|
ポジション2:押し込み量をストロークの中間位置で止めた状態 |
ポジション3:ストローク一杯まで押し込んだ状態 |
- ポジション3まで完全に押し込むと、接点は開く
- ポジション3から1へ戻るときは、接点はoff(break)のままon(make)しない。3⇒1へ戻るとき、ポジション2を通過しますが、2で接点はonしません。offのままです。これが機能上の特徴といえます。
このような機能を想定したスイッチの意味は?
- 人は通常状態のときは、手を握らない(無意識)
- 何かを操作したいとき、中間位置まで押し、動作可能状態にする(意識的行動)
- 人が危害に遭ったときは、手を強く握りしめるor手を離す(反射行動)
このような人の特性を考えてこういった機能を持ったスイッチが考えだされました。このようなスイッチを考え出したのは、日本のIDECというメーカーです。災害を減らしたい!その想いがこういった機能を持ったスイッチを生み出したんですね!
安全適合監視速度機能が有効な状態って?
『ロボットは、安全適合監視速度機能が有効な状態で運転しなければならない』これは、どういう意味なのでしょうか?
実際の操作に当てはめると、次のように言い換えられます。
ハンドガイド装置を使用して、協働ロボットを操作するとき(ティーチングや調整をおこなうとき)、つまりロボットの可動範囲内で手動による操作をおこなうときは、TCP速度や各軸の速度が設定値を超えないよう監視し、超えたら保護停止しなさいということ。超えなければ、運転操作できる、ということを表しています。
TCP:Tool Center Point の略 ロボットアームの先端(エンドエフェクタ)に取り付けたハンドの中心点のこと。 ハンドが二本指で挟むタイプの場合、指間の真ん中の位置をTCPといいます。 |
安全適合の監視された速度の制限値って?
『安全適合の監視された速度制限の値は、リスクアセスメントによって決定しなければならない』これは、どういう意味でしょうか?
作業をおこなうにあたっての安全な速度制限値の決め方は、ハンドガイド装置を使用して、協働ロボットのティーチングや調整をおこなうとき、ロボットの可動範囲内で手動による操作をおこなうときのTCP速度や各軸の速度は、リスクアセスメントをおこない、その結果から許容可能なリスクレベルとなるように、上限速度を決定しなさい、ということ。
危害の酷さが、許容可能なリスクレベルとなる方策がとれなければ、さらなる方策をおこない、許容可能なリスクレベルとなるまで、アセスメントを繰り返す必要があります。このようなプロセスを経て、上限速度を決定します。
♦よもや話あれこれ♦
規格上、ハンドガイドの設置場所については、アーム先端に取り付けなさいとは書かれていません。単に「エンドエフェクタの側に配置」、としか表現されていません。
これは、何を意味するのでしょう!
ハンドガイドは、側に配置できれば良く、アームに固定が必須ではないということです。これは、将来の技術の進歩を見据えた上での表現かもしれませんね!
また、ハンドガイドは現行規格では、定義されていないため、ロボットメーカーやSI(システムインテグレータ:SIerは、和製英語で海外では通じません)が、「これは手でロボットをガイドしながら操作する装置なので、ハンドガイドだ!」と言ってしてしまえば、それがハンドガイドということになります。色々な解釈が出来る規格って面白いですね!!下記掲載の写真のような、無線式ハンドガイドといのも面白いかもしれないですね。(実際はもっと近く、ハンドの側で触りながらの操作など)

【~馬場の独り言~】
このスイッチが国際規格に採用されるまでのこととして、興味深い話しがあります。ホントかどうか、私は直接その場に立ち会ったわけではないので、真偽の程はわかりませんが、次のような話しが伝わっています。
日本発のこのスイッチ、当初EUを始めとする欧米では採用に否定的でした。ところが、日本が商品化した数年後、欧米のメーカーも商品化!その後、国際規格に採用となりました。
これを皆さんは、どう考えますか?
規格というツールを使っての戦略、、、 欧米のしたたかさを感じませんか!?「先んずれば即ち人を制し、後るれば則ち人の制せらるる所と為る」史記です。日本も負けていられないですね!!

次回は、速度及び間隔の監視について説明します。
copyright 2022 SK Solution Co.Ltd All rights reserved
▼お問い合わせはこちら
▼ロボット出張デモ / ロボルーム見学申し込みはこちら
▼【お役立ち資料】これから協働ロボットの導入を検討される方へおすすめ
▼ロボットの要求事項に関しては下記の記事もおススメです。





