MG400
実際にロボットを
見て、触ってみたい方はこちら


|
機種名 |
DOBOT MG400 | |
|
ペイロード |
500g(MAX750) | |
| リーチ | 440㎜ | |
| 繰返し精度 | ±0.05㎜ | |
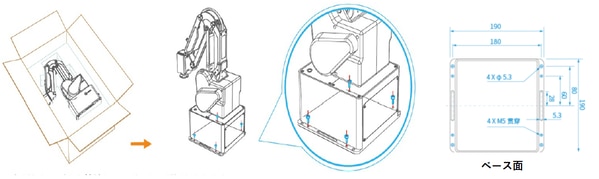
| 本体サイズ | 190㎜×190㎜(底の寸法) | |
| 本体重量 | 8kg | |
| エンコーダ | アブソリュートエンコーダ | |
MG400は、DOBOT Magicinを使う産業界のユーザー様からの要望で生まれた、190mm×190mmとコンパクトな、4軸デスクトップロボットアームです。プログラミング言語は、ビジュアルプログラミング言語=Blocklyを採用しており、視覚的なオブジェクトでプログラミングが可能で、ロボット初心者の方も簡単に操作することができます。 操作方法だけでなく、価格帯もお手頃となっている為、ロボット導入の第1歩におすすめのロボットです。

MG400に減速機が付くことで、J4軸の回転に必要なトルクが増加します。これにより以下のメリットがあります。
通常版の定格トルク:0.16[Nm] → 減速機付きバージョン:0.675[Nm]
減速機付きは通常版の約4倍のトルクが得られるため、重いワークや位置決めが難しい作業でも振動を抑え、より安定した動作が可能です
| |
MG400(standard) | MG400(with motor reducer) |
| with motor reducer |
with motor reducer at the end of j4 |
|
| Nominal voltage | 48V DC | |
| Nominal rotational speed | 2000rpm | 2900rpm |
| Nominal torque | 0.16 N・m | 0.675N・m(0.88N・m/420rpm) |
| )Nominal power | 30W | |
| Reduction ratio | / | 6.75:1 |
| Backlash | / | 40 arcmin |
| Nominal current | 1.26A | 1.1A |
|
Rotor inertia(motor) |
0.07kg・cm2 | |
| Load inertia reference value | 500kg・mm2 | 2500kg・mm2 |
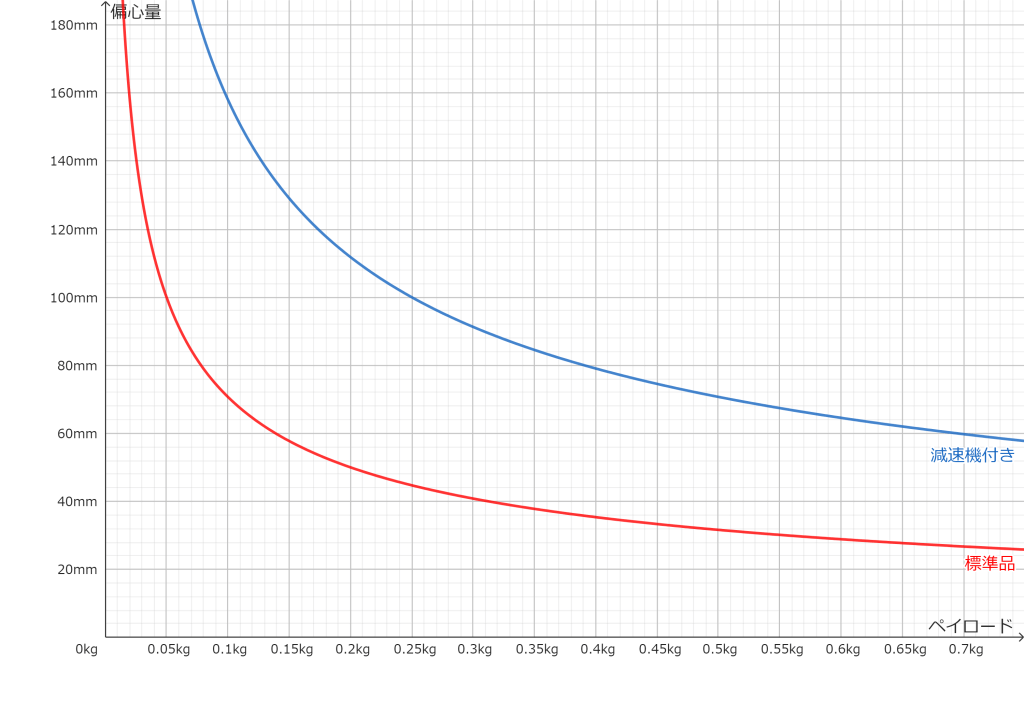
MG400の性能に影響を与える要素として、「偏心量」と「ペイロード」があります。
偏心量:J4軸の中心からワークの重心までの距離
ペイロード:運搬できる重量
偏心量が大きくなるほどペイロードは減少しますが、減速機を使用するとこの減少を抑えることができます。
例:偏心量60mm時のペイロード
- 標準版:190g程度
- 減速機付き:700g程度
減速機付きバージョンは、以下のような状況で特に効果を発揮します
1.重いワークを扱う場合
ワーク重量がメーカー推奨値の500g以上になると、J4軸への負荷トルクが大きくなるため、減速機による安定性が役立ちます。
2.細長いワークや面積の大きいワークを扱う場合
形状の影響で負荷トルクが増えるため、減速機を使用することで振動やブレを抑えることができます。
3.偏心量が大きいワークを扱う場合
偏心量が増えても減速機によりペイロードの減少が抑えられるため、安定した運搬が可能です。
特に重いワークや偏心量が大きい場合に対応するため、MG400の減速機付きバージョンは標準版よりも高い性能を発揮します。ワーク条件がこれらに該当する場合、減速機付きの購入を検討するのが得策です。
Q.
A.
MG400には付属していません。専用オプションとして販売しております。また、工場内エアー源から直接MG400に使用することも出来ます。

Q.
A.
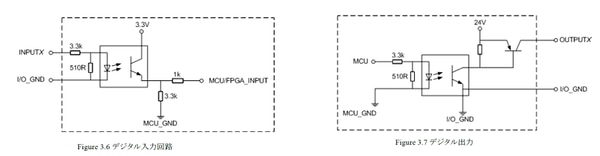
入出力共にPNPです。
I/Oの回路図は公式サイトよりダウンロードできるユーザーガイドに記載されています。
Q.
A.
下記メーカサイトより無償ダウンロードが可能です。
メインページ⇒Support⇒DOWNLOAD CENTERと進んでください。※ダウンロードにはユーザー登録が必要です。
Q.
A.
使用環境、方法などにより変わってきますので、一概にはお伝え出来ません。
ご参考として、MG400は第三者認証機関から平均故障間隔(MTBF)が20,000時間であることの証明を受けております。
Q.
A.
①台にロボットベースをM5ネジ4本で固定します。
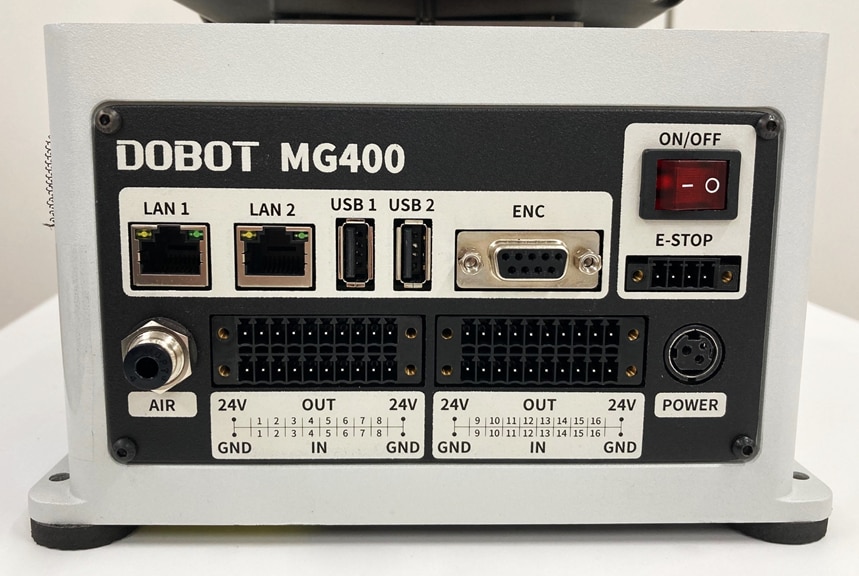
② 必要なケーブルを接続し、ロボットの電源を入れます。
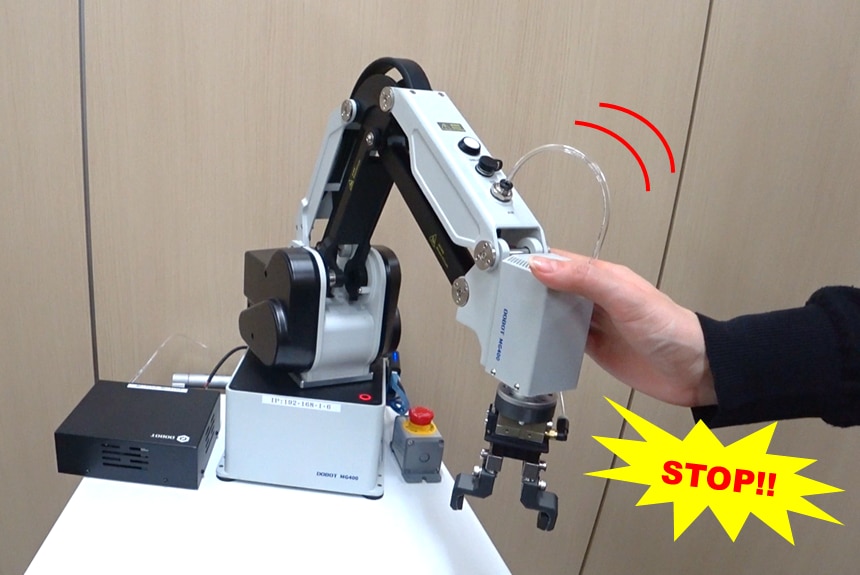
1. 緊急停止ボタンのケーブルを繋ぎます。

2. 電源ケーブルを繋ぎます

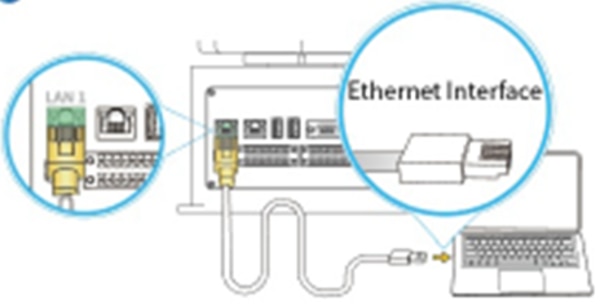
3. ネットワークケーブルを繋ぎます。
4. ロボットの電源を入れます。

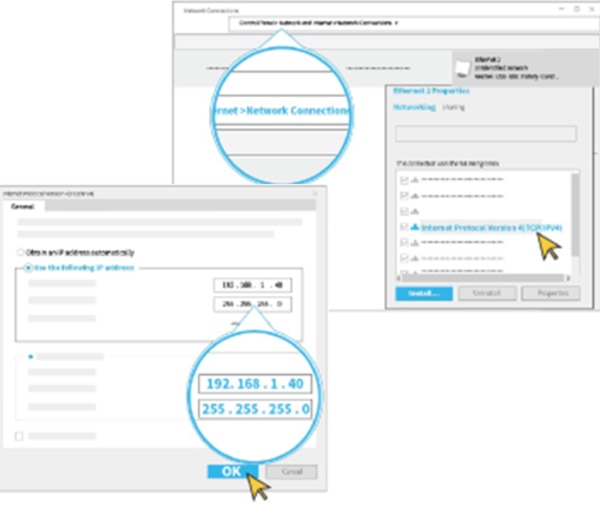
③ロボットと通信するために、コンピュータのIPアドレスを設定します。ロボットのIPアドレスは192.168.1.6のため、同じネットワークセグメントにあるコンピュータのIPアドレスを衝突しないように設定してください。
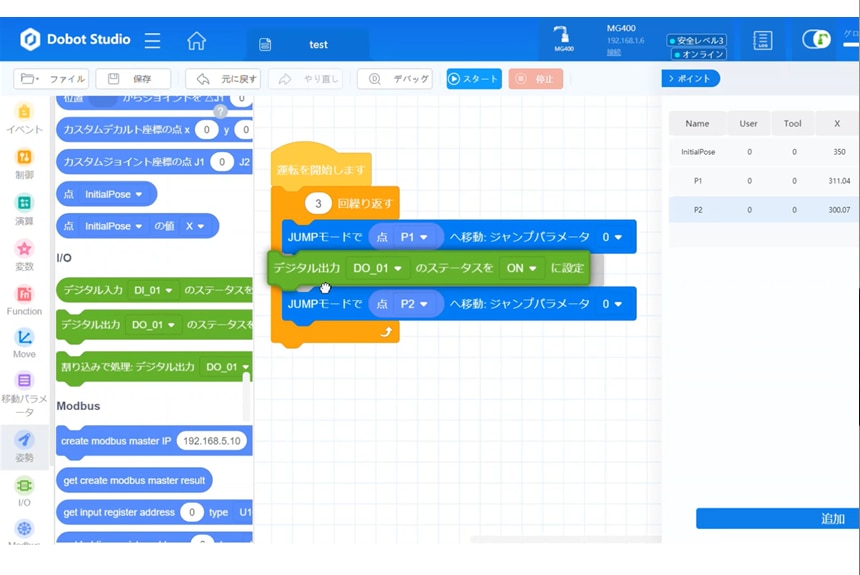
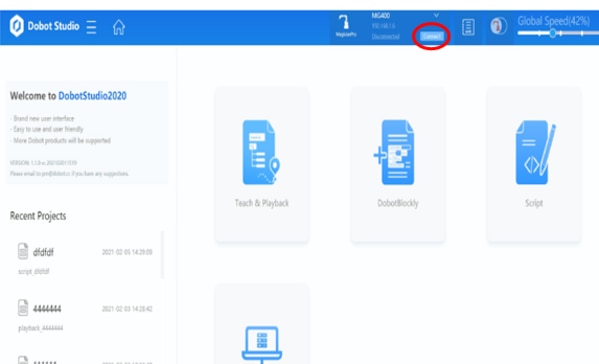
④ DOBOTStudioProを起動し、右のデバイスのIPアドレスを選択し「Connnect(接続)」をクリックします。







Useful Information
Video