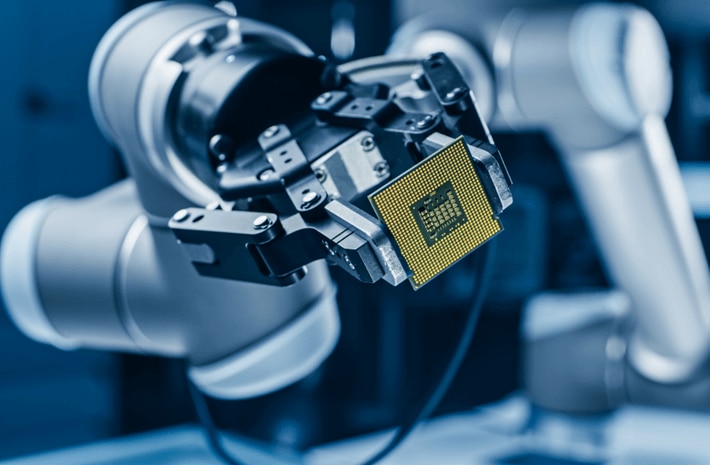
ロボットハンドとは? 主な種類と選ぶ際のチェックポイント
製造業や物流業など、さまざまな業界で「ファクトリーオートメーション(=工場の自動化)」が注目されています。
ファクトリーオートメーションの手段は複数あり、そのひとつに「ロボットハンドの導入」があります。ロボットにロボットハンドを装着することで、ワーク(製品や部品)の把持・移動を自動化でき、業務の効率化を実現できます。
この記事では、ロボットハンドの特徴や種類、選ぶ際のポイントについて解説します。工場のファクトリーオートメーションを検討中の方は、ぜひ参考にしてみてください。
目次[非表示]
ロボットハンドとは
ロボットハンドとは、さまざまな業界の工場において「人間の手の代わり」となる部品です。人間の手と同じく5本指のものもあれば、2本指・3本指のものもあり、それらをロボットアームの先端に装着して活用します。つかむ・回す・加工するなど、さまざまな動作に適応しているため、製造や物流の現場で戦力になり得ます。
工場での作業にロボットハンドを導入することには、さまざまなメリットがあります。
例えば、作業スピードの均一化により生産性の向上が期待できます。また、精度を維持したまま同じ作業を行えるため、品質の安定化にもつながります。さらに、危険を伴う作業をロボットハンドでの作業に代替すれば、従業員の安全を確保することが可能です。
工場でロボットハンドを活用することで、安全第一を守りながら業務を効率化し、品質を高めることができます。
ロボットハンドの種類
ロボットハンドは大きく「把持型」と「吸着型」の2つに分けられます。そこからさらに細分化され、それぞれで特徴は異なります。
把持型
把持型は、人間の手のようにワークをつかみ、移動させたり回転させたりするロボットハンドです。主に「電動型」と「空気圧型」の2つに分けられます。
電動型は、モーターを原動力とするロボットハンドです。つかむ位置を細かく調整できるため、サイズや形状、向きが異なるワークをひとつのロボットハンドで扱うことができます。
空気圧型は、空気圧を原動力とするロボットハンドです。供給する空気圧によって把持力を調整できるシンプルな構造になっているため、電動型に比べて取り扱いやすいといえます。
吸着型
吸着型は、ワークを吸着して移動させたり回転させたりするロボットハンドです。主に「真空型」と「磁力型」の2つに分けられます。
真空型は、真空にしてワークを吸着するロボットハンドです。ガラスや金属など把持型ではつかむのが困難なワークに対応できる一方で、表面に水分や油分が付着していたり、対象物に穴や凸凹があったりする場合はうまく吸着できません。
磁力型は、磁石でワークを吸着するロボットハンドです。金属をはじめとした磁力に反応するワークしか取り扱えませんが、表面に多少の穴や凸凹があっても持ち上げられます。
ロボットハンドを選ぶ際の6つのポイント
ロボットハンドの豊富な種類から自社に適したものを選ぶためには、以下でご紹介する6つのポイントを押さえることが重要です。
なお、『SKソリューション株式会社』ではワークに合ったロボットハンドの提案を行っています。複数のメーカーのデモ機を保有しているため、お客様の実際のワークでピックテストを行ったうえで、最適なハンドの選定・ご提案が可能です。この機会にぜひご相談ください。
1.把持・吸着力
ロボットハンドの種類によって、把持・吸着力は異なります。
▼ロボットハンドの種類別に見る把持・吸着力
種類 | 把持・吸着力 | |
把持型 | 電動型 | サイズや形状、向きが異なるワークも把持可能 |
空気圧型 | ||
吸着型 | 真空型 | 把持型でつかむのが困難なワークも吸着可能 (※表面に水分や油分が付着していたり、対象物に穴や凸凹があったりする場合は吸着不可) |
磁力型 | 磁力に反応するワークのみ吸着可能 | |
把持・吸着力は、ワークの重量・材質・形状を基準に選ぶことが重要です。自動化したい作業内容に合わせて検討してみてください。
2.把持速度
ロボットハンドを選ぶ際は、把持速度もチェックしてください。
把持型の場合、指の開閉に時間を要するため把持速度が遅い傾向にあります。一方で吸着型は、真空や磁力のオン・オフを切り替えるだけで把持できるため、その速度は把持型に比べて早いのが特徴です。
この点から、生産ラインの効率化に重きを置いている場合は、把持速度が早い吸着型のロボットハンドを選ぶのがよいといえます。
3.汎用性
複数の作業でロボットハンドを活用する場合は、汎用性にも目を向けるのがおすすめです。
サイズや形状、向きが異なるワークに対応したロボットハンドを選ぶことで、対象物ごとにハンドを付け替える必要がなくなり、より効率的にファクトリーオートメーションを進めることができます。
4.制御精度
制御精度とは、ロボットハンドの指の位置や把持・吸着力、把持速度などを調整できるかどうかを指す指標です。
複数の作業でロボットハンドを活用する場合は、特に優れた制御精度が求められるため、精密性・再現性の高いロボットハンドを選んでください。
5.安全性
工場に産業機器を導入する際は、安全性の確認が必須です。特に従業員がロボットハンドを使用して作業する場合は、最重要の確認項目といえます。
具体的には、ロボットハンドの安全装置の有無や速度制限を確認します。同時に、従業員が安全に協働できるよう、安全柵を設置して作業エリアを明確に区切ることも大切です。
6.メンテナンス性
ロボットハンドを長く安定的に活用するには、メンテナンス性も確認しておくことが重要です。
日常的な点検や故障時の修理(部品交換)が容易に行えるタイプなら、不具合に適宜対応できるため、長期的なコスト削減および安定稼働を実現しやすくなります。
まとめ
この記事では、ロボットハンドについて以下の内容を解説しました。
- ロボットハンドは「人間の手の代わり」となる部品
- 「把持型(電動型・空気圧型)」と「吸着型(真空型・磁力型)」がある
- ロボットハンドを選ぶ際は、「把持・吸着力」「把持速度」「汎用性」「制御精度」「安全性」の5つのポイントを押さえることが重要
ロボットハンドは「安全第一を保ちながら生産性と品質を高められる部品」です。ロボットに装着することで、作業の効率化が図れます。
ロボットハンドの導入はファクトリーオートメーションの一歩であり、作業の自動化は生産性の向上や省人化・省力化など、工場にとってうれしいメリットをもたらします。そのため、この機会にロボットハンドおよびロボットの導入をぜひ検討してみてください。
『SKソリューション株式会社』では、協働ロボットの導入を含むファクトリーオートメーションの要件定義から、システムの構築・設計、設置工事、立ち上げまでトータルサポートします。生産技術者のリソース不足を解消しながら自動化を実現できるのが強みです。
また、本社のショールームにてさまざまなロボットを使った事前検証をご覧いただくことも可能ですし、デモ機を体験いただける出張対応にも柔軟に対応しています。「どのようにファクトリーオートメーションを導入したらよいか分からない」という場合は、どうぞお気軽にお問い合わせください。