
Robotiqハンド接続型式について
Robotiqハンド接続型式について
(オムロン TMシリーズ/TMSシリーズ)
Robotiq社製ロボットハンドは、TMシリーズとTM Sシリーズで接続可能な種類が異なります。
各シリーズに対応する接続型式と接続方法を以下にまとめましたので、ご確認ください。
オムロンキット(Robotiq接続方法)
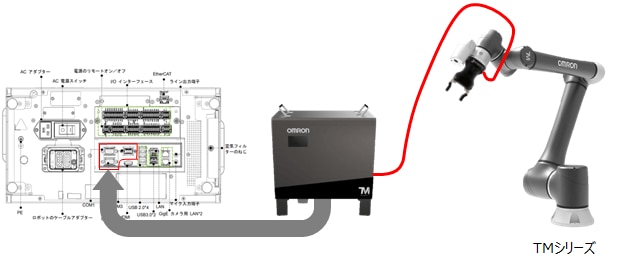
▼配線方法
グリッパカップリングから伸びるケーブルを機外配線し、ロボットコントローラのシリアル通信ポート(RS232C)に接続します。(RS485⇔RS232Cコンバータを使用します)
▼制御方法
- シリアル通信(RS485)でグリッパを制御します。
- TMFlowの中で、Robotiq専用ノードにより、グリッパのストローク、速度、力を都度設定することが可能です。
| アイコンノード | TM Flow | |
|
|
 |
|
 <CLOSEノード> <CLOSEノード> |
 |
|
 <OPENノード> <OPENノード> |
 |
|
 <SETノード>
<SETノード>オムロンキット型式
| 種類 | 型式 | |
 電動グリッパ 電動グリッパ |
|
|
 電動吸着グリッパ 電動吸着グリッパ |
|
|
 力覚センサ 力覚センサ |
|
|
オムロン手首接続キット(Robotiq接続方法)
▼配線方法
IOカップリングから伸びるショートケーブルをロボットフランジのエンドモジュールに接続します。(デジタルI/O制御)

▼制御方法
- ロボットはI/O信号をIOカップリングに送り、カップリングはModbus RTUコマンドを4つの可能なプリセットに基づいてグリッパに信号を送ります。プリセットはI/O信号によって決定されます。
- 使用前にRobotiq User Interface(専用のPCソフト)で、グリッパのストローク、速度、力を4パターン登録します。(プリセット登録)
- TMFlowの中でIOカップリング専用ノードにより、上記4つのプリセットを呼び出して使用します。
【Robotiq User Interfaceによるプリセット登録画面】
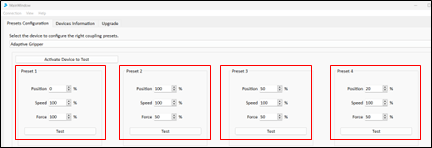
グリッパのストローク・開閉スピード・開閉する力を1プリセットとして、4パターン登録可能
| アイコンノード | TM Flow | |
 |
 |
•グリッパとIOカップリングをアクティブにするノードです。 •プリセット使用前に、一度だけ使用する必要があります。 |
 |
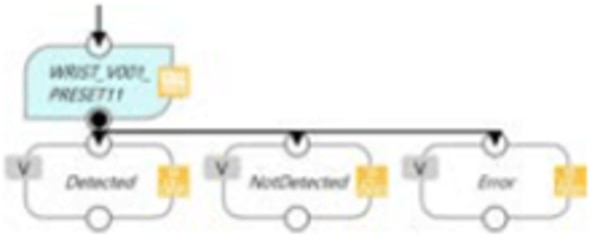 |
•プリセット1~4を使用し、グリッパを動作させるノードです。 |
リッチテキストを入力してください
オムロン手首接続キット型式
| 種類 | 型式 | |
 電動グリッパ 電動グリッパ |
•HND-OMRON-KIT-W •AGC-OMRON-KIT-85-W •AGC-OMRON-KIT-140-W |
|
| 電動吸着グリッパ |
•VAC-OMRON-EPICK-KIT1-W •VAC-OMRON--EPICK-KIT2-W •VAC-OMRON--EPICK-KIT4-W |
|
| 力覚センサ | 手首接続キット用型式はありません | |
Robotiq接続型式(OMRON TMSシリーズ)
対応ロボット機種
接続できるRobotiqキット
オムロンキット
オムロン手首接続キット
Sシリーズ用キット
Sシリーズ用キット
▼配線方法
カップリングから伸びるショートケーブルを機外配線し、ロボットフランジのエンドモジュールに接続します。(RS485通信)

▼制御方法
- シリアル通信(RS485)でグリッパを制御します。
- TMFlow2の中で、Robotiq専用ノードにより、グリッパのストローク、速度、力を都度設定することが可能です。
| アイコンノード | TM Flow2 | |
<SETノード> |
 |
|
 <CLOSEノード> <CLOSEノード> |
 |
|
 <OPENノード> <OPENノード> |
 |
|
Sシリーズ用キット型式
| 種類 | 型式 | |
 電動グリッパ 電動グリッパ |
|
|
| 電動吸着グリッパ |
|
|
| 力覚センサ | Sシリーズキット用型式はありません | |
オムロンTM/TM Sシリーズ接続可否リスト
| Robotiqグリッパ | TMシリーズ | TMSシリーズ | ||||||
| 機種 | 型式 | 対応可否 | 配線先 | 備考 | 対応可否 | 配線先 | 備考 | |
 |
2F-85 |
AGC-OMRON-KIT-85 |
〇 | コントロールボックス |
RS232~RS485変換コンバータ経由 |
〇 |
コントロールボックス |
Sシリーズ用RS485コンバータ経由 |
|
AGC-OMRON-KIT-85-W |
〇 |
ロボットのエンドモジュール(I/O) |
IOカップリング経由 |
〇 |
ロボットのエンドモジュール(I/O) |
IOカップリング経由 |
||
|
AGC-OMRON-S-KIT-85 |
× | ー | ー | 〇 |
ロボットのエンドモジュール(RS485) |
Sシリーズ用カップリング経由 |
||
 |
2F-140 |
AGC-OMRON-KIT-140 |
〇 |
コントロールボックス |
RS232~RS485変換コンバータ経由 |
〇 |
コントロールボックス |
Sシリーズ用RS485コンバータ経由 |
|
AGC-OMRON-KIT-140-W |
〇 |
ロボットのエンドモジュール(I/O) |
IOカップリング経由 |
〇 |
ロボットのエンドモジュール(I/O) |
IOカップリング経由 |
||
|
AGC-OMRON-S-KIT-140 |
× | ー | ー | 〇 |
ロボットのエンドモジュール(RS485) |
Sシリーズ用カップリング経由 |
||
 |
Hand-E |
HND-OMRON-KIT |
〇 |
コントロールボックス |
RS232~RS485変換コンバータ経由 |
〇 |
コントロールボックス |
Sシリーズ用RS485コンバータ経由 |
|
HND-OMRON-KIT-W |
〇 |
ロボットのエンドモジュール(I/O) |
IOカップリング経由 |
〇 |
ロボットのエンドモジュール(I/O) |
IOカップリング経由 |
||
|
HND-OMRON-S-KIT |
× | ー | ー | 〇 |
ロボットのエンドモジュール(RS485) |
Sシリーズ用カップリング経由 |
||
 NEW!! |
Hnad-E C10 |
ー | × | ー | ー | × | ー | ー |
| ー | × | ー | ー | × | ー | ー | ||
|
HND-C10-OMRON-S-KIT |
× | ー | ー | 〇 |
ロボットのエンドモジュール(RS485) |
Sシリーズ用カップリング経由 |
||
 |
E-pick |
VAC-OMRON-EPICK-KIT1/2/4 |
〇 |
コントロールボックス |
RS232~RS485変換コンバータ経由 |
〇 |
コントロールボックス |
Sシリーズ用RS485コンバータ経由 |
|
VAC-OMRON-EPICK-KIT1/2/4-W |
〇 |
ロボットのエンドモジュール(I/O) |
IOカップリング経由 |
〇 |
ロボットのエンドモジュール(I/O) |
IOカップリング経由 |
||
| VAC-OMRON-S-EPICK-KIT1/2/4 | × | ー | ー | 〇 | ロボットのエンドモジュール(RS485) | Sシリーズ用カップリング経由 | ||
<オムロンキットの主な同梱品>

<手首接続キットの主な同梱品>

<Sシリーズ用キットの主な同梱品>

お問い合わせ
資料ダウンロード
Useful Information
お役立ち情報
ファクトリーオートメーション化に関するお役立ち情報を掲載しています。これらは、「どういう意味?」と疑問に思われる内容や、ロボットの活用事例、さらに展示会へ出展した際の様子などを含めて紹介しています。
Video
お役立ち動画
取り扱いをしているロボットや画像処理(イメージセンサ)製品の活用事例や、使用方法、展示会出展動画などを掲載しています。
製造ラインの人手不足でお悩みの方は
お気軽にご相談ください
お電話でのお問い合わせはこちら
ご不明な点はお気軽に
お問い合わせください
お問い合わせください
モノづくりに革命をもたらす
お役立ち資料はこちら
お役立ち資料はこちら
ロボットを実際に
見て触ってみたい方はこちら
見て触ってみたい方はこちら
